




 English
English 中文
中文 Italian
Italian Türkçe
Türkçe Español
Español Deutsch
Deutsch العربية
العربية Tiếng Việt
Tiếng Việt Français
Français Русский
Русский



Sra. Lizzy
Olá, aqui é a Lizzy da Dinosaw Machine (não sou um robô). Qual máquina (modelo) você está buscando? Fale conosco diretamente pelo WhatsApp.
Horário de Atendimento:8:30am-20:30pm
WhatsApp: +86 198-5901-3937
 Sep 19, 20255 MIN DE LEITURA
Sep 19, 20255 MIN DE LEITURA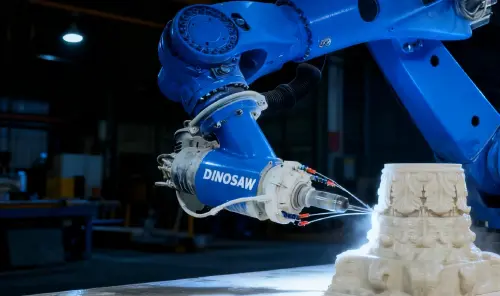 Sep 19, 20255 MIN DE LEITURA
Sep 19, 20255 MIN DE LEITURAUma análise técnica da célula robótica de escultura em pedra DINOSAW de 7 eixos. Explore sua arquitetura, componentes principais, parâmetros operacionais e estratégias de mitigação de falhas para granito, mármore e calcário. Alcança repetibilidade de ±0,06 mm.
A escultura em pedra — granito, mármore e calcário — leva os limites mecânicos ao extremo: precisão, rigidez e controle de poeira/lama. Uma célula robótica de escultura em pedra de 7 eixos (robô de 6 eixos + mesa rotativa + spindle refrigerado a água) oferece repetibilidade (±0,06 mm, segundo o fabricante), operações mais seguras e tempos de ciclo previsíveis.
Veja a escultura robótica em pedra DINOSAW para referência de arquitetura, alimentada por ferramentas diamantadas.
Precisa adequar essas especificações técnicas ao seu chão de fábrica? Nossos engenheiros podem fornecer um plano detalhado de integração.
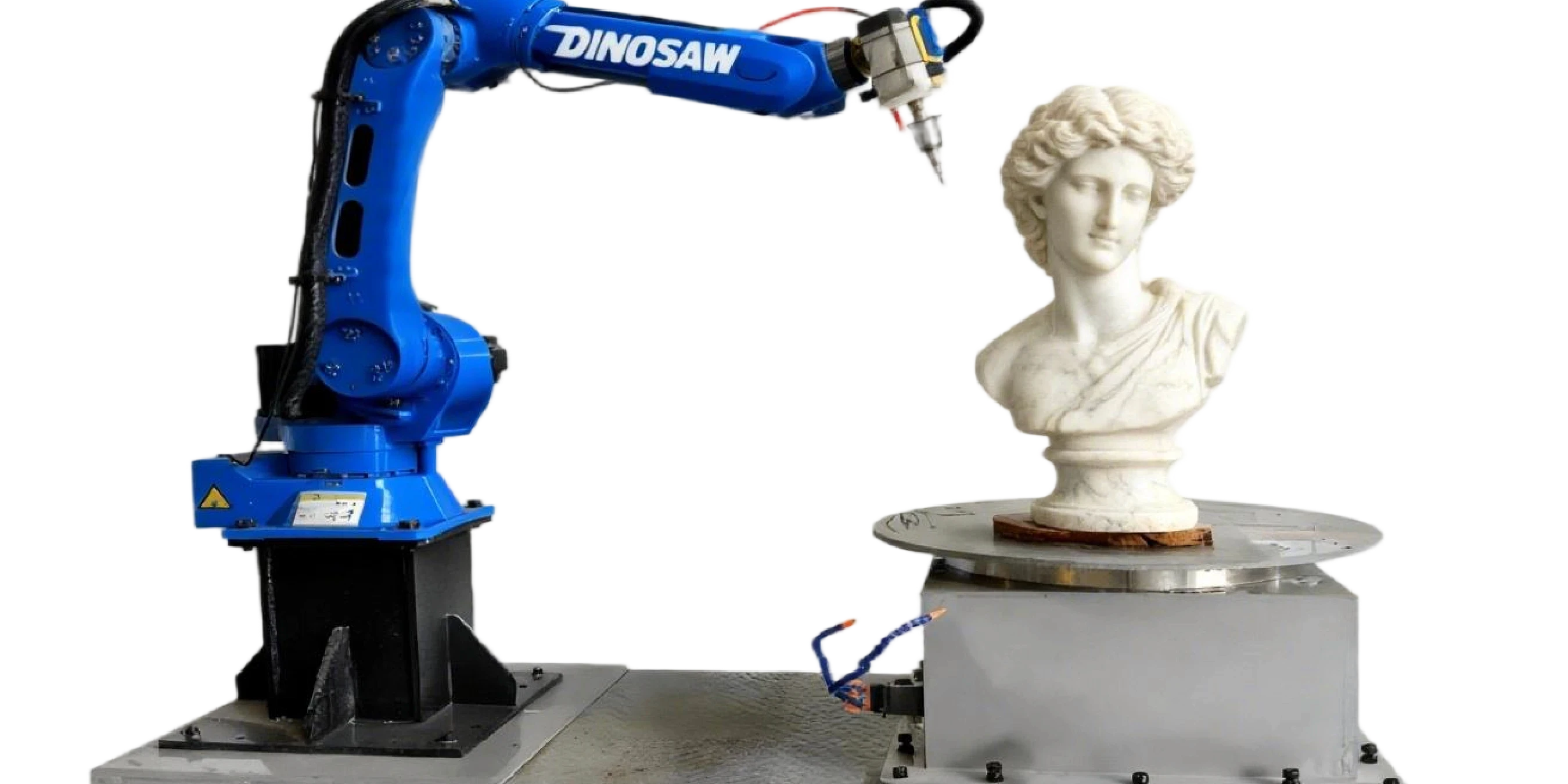
O desempenho da célula baseia-se na interação perfeita de quatro pilares: mecânica, controles, software e segurança. O fluxo típico começa com uma varredura 3D ou modelo CAD, importado no software CAM para gerar a trajetória de ferramenta multi-eixos. Esse programa é então enviado ao controlador do robô, que executa os movimentos complexos e sincronizados necessários para a escultura.
Cada componente da célula robótica de pedra possui uma faixa operacional definida. Compreender esses parâmetros — do spindle refrigerado a água para o sistema de escultura até as ferramentas diamantadas DINOSAW específicas — é crucial para otimização do processo e resolução de problemas.
| Componente | Parâmetros-Chave & Faixas Típicas |
|---|---|
| Spindle Refrigerado a Água | Velocidade: 6.000–24.000 RPM; Torque: Nm em várias RPM; Fluxo de refrigerante: 5–15 L/min (1,3–4,0 gpm) |
| Ferramentas Diamantadas DINOSAW | Diâmetros de haste: 6 mm, 8 mm, 12 mm ; Famílias de ferramentas: fresas esféricas/planas, pontas cônicas para gravação, pontas em V, fresas rotativas. |
| Mesa Rotativa (7º Eixo) | Diâmetro: diâmetro compatível com o maior bloco (confirmar no projeto de fixação), mm/pol; Carga máxima: capacidade selecionada para seu bloco mais pesado (confirmar no projeto mecânico), kg. |
| Sistema de Visão/Varredura | Resolução: varia conforme o modelo do scanner (confirmar com o fornecedor), espaçamento de pontos em mm. |
A manutenção proativa e o entendimento dos modos de falha são essenciais para maximizar o tempo produtivo em ambientes de escultura em pedra de alto desgaste.

Uma célula robótica não opera isoladamente. Sua capacidade de se comunicar com outros sistemas da fábrica e aceitar formatos de dados padrão é fundamental para sua utilidade.
As tabelas a seguir fornecem pontos de partida conservadores para escultura em diferentes tipos de pedra. Devem ser ajustados conforme a máquina, ferramenta e lote de material específicos.
| Processo | Ferramenta | Velocidade do Spindle (RPM) | Avanço (mm/min) | Avanço Lateral |
|---|---|---|---|---|
| Desbaste | Fresa Esférica DINOSAW | 8.000–12.000 | 1.000–2.000 | 40-50% do diâmetro da ferramenta |
| Acabamento/Letreiramento | Ponta em V DINOSAW | 15.000–20.000 | 500–1.000 | N/A |
| Processo | Ferramenta | Velocidade do Spindle (RPM) | Avanço (mm/min) | Avanço Lateral |
|---|---|---|---|---|
| Desbaste | Fresa Esférica DINOSAW | 10.000–15.000 | 1.500–3.000 | 50-60% do diâmetro da ferramenta |
| Acabamento | Ponta Cônica DINOSAW | 18.000–24.000 | 800–1.500 | 5-10% do diâmetro da ferramenta |
| Processo | Ferramenta | Velocidade do Spindle (RPM) | Avanço (mm/min) | Avanço Lateral |
|---|---|---|---|---|
| Desbaste | Fresa Esférica DINOSAW | 12.000–18.000 | 2.500–4.000 | 50-70% do diâmetro da ferramenta |
| Acabamento | Ponta Cônica DINOSAW | 20.000–24.000 | 1.200–2.000 | 10-15% do diâmetro da ferramenta |
A célula de escultura de 7 eixos DINOSAW é um ecossistema projetado para precisão e durabilidade na fabricação de pedra. Sua arquitetura — do spindle refrigerado a água e ferramentas diamantadas DINOSAW ao sistema de controle robusto — mitiga diretamente falhas comuns como vibração e deriva térmica. Para engenheiros e equipes de manutenção, isso se traduz em maior tempo produtivo, qualidade consistente e ambiente de trabalho mais seguro. O próximo passo é mapear essas capacidades técnicas para suas necessidades operacionais específicas.
Uma capacidade de carga selecionada para seu bloco mais pesado (confirmar no projeto mecânico), kg, e alcance dimensionado para o maior envelope de peça (confirmar no layout), mm/pol, são pontos de partida típicos. Isso deve considerar o peso do spindle, trocador de ferramentas e da própria ferramenta. A mesa rotativa terá dimensões de diâmetro compatível com o maior bloco (confirmar no projeto de fixação), mm/pol.
Planeje uma mesa com diâmetro compatível com o maior bloco (confirmar no projeto de fixação), mm/pol, e capacidade máxima de carga selecionada para seu bloco mais pesado (confirmar no projeto mecânico), kg. A precisão de indexação é normalmente especificada em segundos de arco (confirmar com o fornecedor). Garanta espaço suficiente ao redor da mesa para o alcance total do robô.
Gerencie a temperatura do spindle conforme orientação do fabricante (refrigeração e controle de temperatura). Considere um ciclo de aquecimento e agende passes críticos de acabamento após a estabilização térmica.
O sistema normalmente suporta protocolos industriais como Profinet ou OPC UA para integração. Confirme as necessidades específicas de protocolo durante a fase de projeto. Isso permite o mapeamento de I/O para periféricos (fixações, sensores) e integração em um circuito central de segurança.
Práticas de segurança típicas incluem circuito de parada de emergência e portas de acesso intertravadas, complementados por proteção de invólucro (ex.: IP65) e monitoramento do status do spindle. Consulte normas locais para dispositivos obrigatórios e frequência de testes.
Métodos comuns incluem monitoramento de tendências de carga do spindle para aumentos, uso de contadores de vida útil de ferramenta baseados em software para acionar trocas, ou integração de um medidor a laser para medir automaticamente as dimensões da ferramenta entre ciclos.
Sim. O software de Programação Offline (OLP) (ex.: SprutCAM) é essencial para maximizar o tempo produtivo, permitindo programação enquanto a máquina opera. Também é fundamental para simular movimentos complexos de 7 eixos, evitar colisões e converter dados de varredura 3D em trajetórias executáveis.
 Português
Português
Obtenha uma Solução Fácil
Atendimento Online
Olá, aqui é a Lizzy da Dinosaw Machine (não sou um robô). Qual máquina (modelo) você está buscando? Fale conosco diretamente pelo WhatsApp.
Olá 👋 Como podemos ajudar?